
直接データ設定による駆動方法
シリアルのインタフェースから目標位置の随時更新
各種シリアルのインタフェースからは随時、目標位置・目標速度・目標加速度・電流制限などの設定値を随時更新できます。
各種設定値は事前にモータに保存しておき、目標位置など必要な値だけを随時変更しながら駆動することも可能です。
アナログやパルス列の指令でも停止目標位置の更新が随時できます。
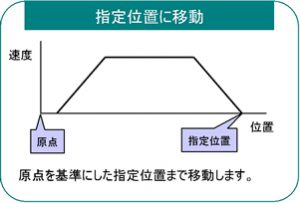
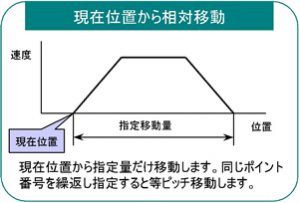
ポイントデータによる駆動方法
ポイントデータ動作 [ 多点 ] モード16、モード64
最大64点までのポイントデータ(位置、速度、加速度、サーボパラメータなど)をモータ本体に登録し、上位コントローラ (シーケンサ) からポイント番号を指定し、スタート指令を入力することによって動作します。16ポイント以内で駆動する場合はモード16で、64ポイント以内で駆動する場合はモード64で駆動できます。 多くのポイントへの動作が簡単に制御できます。また、外部センサやスイッチ信号をモータ本体に直接取り込んで、簡単な接続のみでポイント動作させることもできます。 64以上のポイント数が必要な場合は、RS485やフィールドバスの指令から直接指令することでより多点の位置決め動作が可能です。
以下はポイントデータ動作での動作例です。
簡単ポイントデータ動作 [ 4点 ] モードE
本体へ直接接続したスイッチ信号だけで、最大4ポイントの目標位置および加速度を教示、保存および駆動ができます。
リンク動作 「リンクトムーブ」
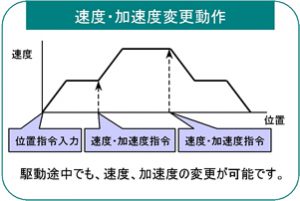
起動用の信号を入力するだけで、複数のポイントをシーケンシャルに実行する簡易シーケンス機能もアクチュエータ本体に内蔵しています。 ポイント移動動作の時間間隔の設定も任意にできます。上位コントローラとの通信を経由せずに内部で直に条件判断し、即シーケンス動作を実行するため、複雑な動作をより正確に実行することが可能となります。例えば、上記速度・加速度変更動作の図では、変更時毎に変更指令を入力していますが、リンクトムーブ機能を使えば、最初の指令だけで同じ動作が可能です。上位装置のプログラミングを簡単にできると同時に動作時の負担を軽くすることができます。